
Fin test bench
The Robot-Palm is a test bench designed to measure the thrust, power and efficiency of a fin under submerged conditions. It simulates finning movements to objectively compare performance and support product design.
- Measuring thrust and power
- Calculating fin efficiency
- Realistic simulation of human swimming
- Support for product comparison and design
Products tested
Sector of activity
Features
The fin test bench is a fin-flapping robot designed to move a submerged fin in a vertical plane and simultaneously measure:
- the power delivered to the fin (force × velocity),
- the thrust generated in the direction of travel.
These measurements enable the calculation of:
- an efficiency indicator (ratio of power output to thrust),
- an acceleration curve for a typical diver,
- the time taken to reach cruising speed.
The system therefore makes it possible to objectively compare different fins and to assist with product design.
Operating principle
The single-fin robot consists of:
- two servo-controlled linear actuators, digitally controlled,
- an instrumented chassis that measures thrust,
- a water velocity measurement system (dynamic option),
- an electrical cabinet and a control PC.
The two actuators interpolate their movements to generate an infinite variety of finning motions within a defined range.
A “leg” and a “removable foot” allow you to put on the fin you wish to test.
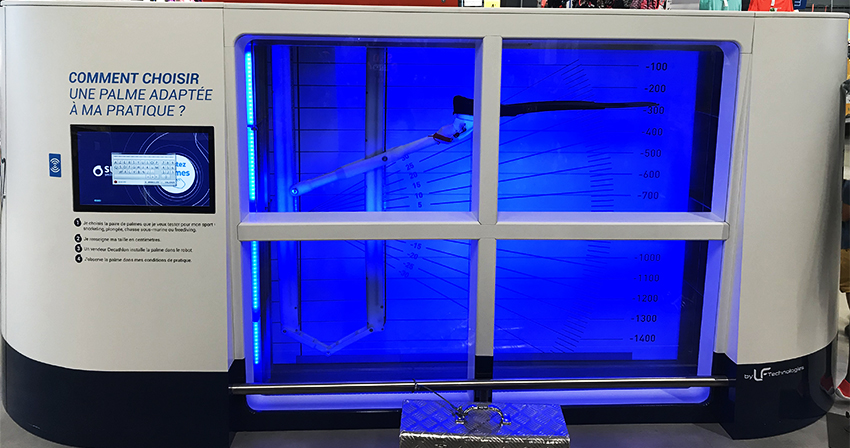
The system continuously measures:
- the position,
- speed,
- the force applied,
- the horizontal thrust generated.
Applications
- Product specification
- Comparison of product ranges (snorkelling, scuba diving, spearfishing)
- Design support
- Validation of the size-to-weight ratio for users
- Objective assessment of perceived performance in use
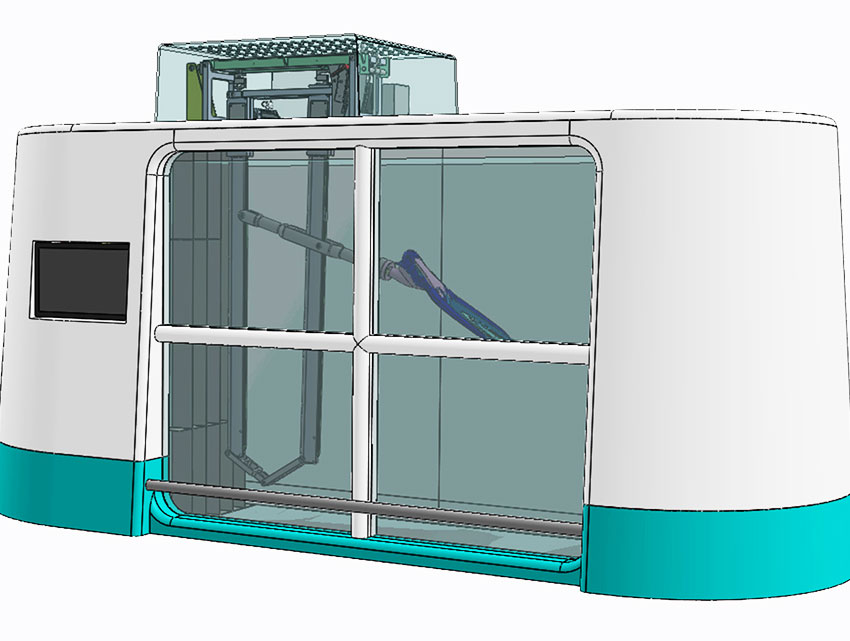
CAD of the finning robot
CAD of the finning robot

In-store Subea palm endurance bench
In-store Subea palm endurance bench
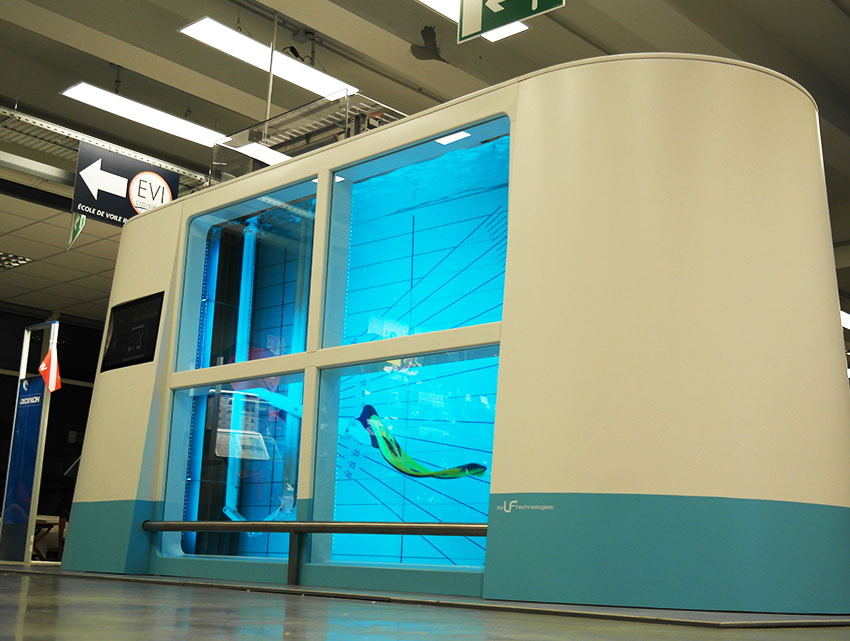
Endurance bench for fins
Endurance bench for fins
Decathlon-Swimmer

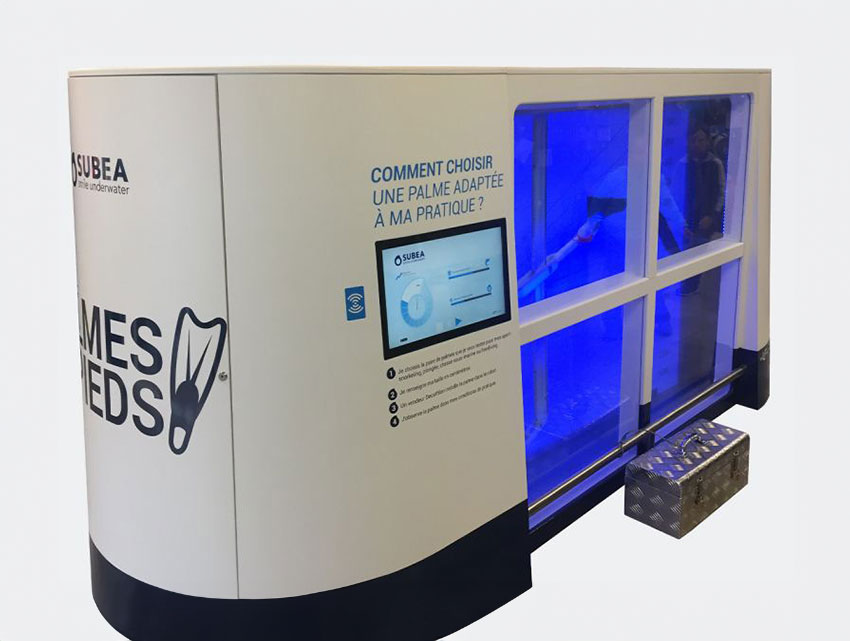
In-store palm test bench
In-store palm test bench
palm-endurance-bench-new-design-in-store
palm-endurance-bench-new-design-in-store
Fin selection screen
Fin selection screen
TECHNICAL SPECIFICATIONS of the swimming robot – efficiency and acceleration measurement
Specification | Robot-Palm |
Max. frequency | 1 Hz |
Max. frequency | ±45° |
Actuator stroke | ≈ 1 000 mm |
Actuator speed | 1 m/s |
Push force accuracy | ±0,1 N |
Power accuracy | ±0,01 W |
Water speed (dynamic basin) | ≈ 3 m/s |
Power supply | 230 V single-phase |
Benefits of the Robot-Palm –
Paddling robot – measuring efficiency and acceleration
- Comparative and objective measures
- Realistic simulation of human swimming
- Calculation of the acceleration time
- Diving with a monofin
Comparative and objective measures
Thrust, transmitted power, efficiency.
Realistic simulation of human swimming
Amplitude, frequency, depth, power limitation
Calculation of the acceleration time
Up to the cruising speed of an average diver
Diving with a monofin
Extrapolable measurements in bipalme
Subéa robot finder presentation
Applications in the sports equipment sector
Would you like to learn more about specialised machinery?
Find out everything you need to know and much more!

Single column traction compression machine
Low force tensile/compression testing up to and including pull-out on small parts.

Racket frame shock bench
Shock resistance bench for racket frame. Vertical impact drop tester to test the frame distorsion after an impact. The tennis ball shaped impactor makes measures more realistic.

Ball Fatigue bench
Cylinder control panel for fatigue testing of materials or products, once integrated into a fatigue device.
ADD-ON MODULES
Explore our add-on modules to get the most out of your special machine!
Discover innovative solutions to further enrich your experience and optimize your results.









